|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPÉDIA DE RÁDIO ELETRÔNICA E ENGENHARIA ELÉTRICA Máquina de vara de pesca eletrônica. Enciclopédia de rádio eletrônica e engenharia elétrica
Enciclopédia de eletrônica de rádio e engenharia elétrica / Casa, casa, passatempo Mesmo as tentativas mais tímidas de transferir para equipamentos eletrônicos algumas funções que uma pessoa costuma considerar "suas" e, portanto, insubstituíveis, despertam uma atitude cautelosa em relação a si mesma. Por último, mas não menos importante, isso se aplica à pesca amadora - uma das formas mais conservadoras de hobbies humanos. Embora seja difícil imaginar uma atividade mais interessante para um designer de rádio amador. A partir da própria formulação dos problemas que aqui surgem, da “algoritmização da intuição” à experimentação do inventado. E não no espaço virtual, para onde temos sido chamados com tanta urgência ultimamente, mas no próprio presente: sob o céu azul, entre florestas e prados, com salpicos de água e peixes sem código de barras.
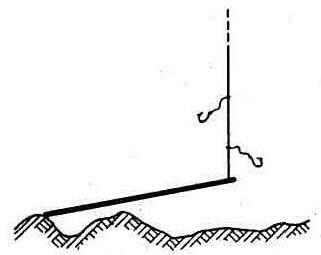
O diagrama cinemático de um dispositivo projetado para fisgar automaticamente peixes em condições difíceis de pesca é mostrado na Fig.1. Aqui: 1 - carcaça, que abriga todo o "recheio" eletromecânico da máquina; 2 - mola plana, o motor principal da máquina; b - balancim de mola com um grampo 7 da linha de pesca 11, formando com um suporte 4, montado em uma placa isolante 3, um par de contatos; 8 - empurrão com brinco de gancho 9; 10 - eixo da caixa de engrenagens com rosca MZ na extremidade; 12 - braçadeira para fixação da máquina a bordo ou popa do barco. No estado engatilhado, a máquina é mantida pelo acoplamento do eixo 10 da caixa de engrenagens com o brinco 9. O motor ligado é capaz de instantaneamente, em poucas rotações do rotor, desconectar este acoplamento. Mas em que ponto isso acontecerá - a eletrônica da máquina decidirá. O algoritmo de seu trabalho é simples. O primeiro sinal elétrico do sensor, que ocorre no momento em que o balancim 6 toca o suporte 4, comuta a máquina para o estado ativo: inicia-se a contagem regressiva e a contagem desses toques, cuja origem ainda não é clara. Se seu número total - tanto interferência quanto mordidas - neste estado ativo do autômato (sua duração é definida) não atingir um certo número N (também definido), o autômato novamente assume o estado inicial - o estado de espera. Se esse número for alcançado, o motor elétrico será ligado e - enganchado. Este algoritmo é implementado pelo "enchimento" eletrônico da máquina, cujo diagrama esquemático é mostrado na fig. 2. Aqui: SF1 - par de contatos "rocker-bracket" - sensor do sistema; SF2 - par de contatos "eixo do redutor-brinco" (o redutor e o motor elétrico são colocados na base-isolador); SA1 - interruptor basculante, cujos contatos SA1.2, quando abertos, desenergizam a parte de alimentação da máquina quando esta é configurada, a isca é trocada, etc.; SA2 - interruptor que define o número de "bites" - N О{2,3,4}; SA3 - alterna a duração dos intervalos de tempo ativos (em segundos) - T О{2, 4, 8}.
Os elementos DD1.1, DD1.2, C2, R4 constituem um único vibrador que elimina uma contagem falsa em DD3 - no contador de "mordidas" - do "salto" dos contatos do sensor SF1. Nos elementos DD2.2, DD2.3, é montado um gerador de pulsos de clock, seguindo a uma frequência de 1 Hz. O contador DD4, somando esses pulsos, define o tempo do estado ativo da máquina. O reset dos contadores, retornando a máquina ao seu estado original - o estado de espera - é realizado por pulsos de amplitude "única", gerados pelos elementos DD2.1 e DD1.3. Isso acontece tanto no final do tempo ativo (quando uma tensão de alto nível aparece no motor do interruptor SA3), ou no início do corte (quando os contatos SF2 são rompidos), ou quando a máquina é desligada manualmente com a chave seletora SA1 - fechando o par de contatos SA1.1. Nos elementos DD2.4, DD1.4 e transistores VT3, VT4, é montado um gerador de tom controlado (pela entrada 2 elemento DD2.4) que, excitando a cabeça dinâmica HA1, sinaliza ao pescador sobre a transição da máquina para o estado ativo. Transistores VT1 e VT2 - uma chave eletrônica para controlar o motor elétrico M1. O indutor L1 no filtro LC é enrolado em um circuito magnético anular (diâmetro externo - 10 ... 12 mm) feito de ferrite com m=1000...2000. Seu enrolamento contém 50...100 espiras de fio PEV-2 0.2...0.3. Uma mola de força plana (2 na Fig. 1) - o motor principal da máquina - é feita de uma tira de bronze fosforoso de 0,8 mm de espessura. Sua largura é de 78 mm e seu comprimento (sem extremidades embutidas) é de 220 mm. A força inicial criada pela mola durante o corte é de 1,3 kg, "máximo" - até 750 mm. Nó 7 - um terminal regular com um orifício para passar a linha de pesca. As dimensões do suporte de contato não são críticas, apenas é importante que as folgas necessárias possam ser definidas entre suas almofadas de contato e a extremidade do balancim movendo-se entre elas: mínimo - 1, máximo - 10 mm. A posição do balancim em relação aos contatos do suporte pode ser alterada tensionando ou afrouxando as molas nos nós 5. A resistência mecânica global de todos esses elementos deve ser suficientemente alta, pois "seguram" o peixe. Em qualquer caso, eles devem suportar 10 ... 15 quilos de empurrões e golpes sem consequências. O eixo do parafuso no qual o balancim oscila deve fornecer resistência mínima. Na fig. 8, A. Motor elétrico 10 - qualquer pequena potência de baixa potência, por exemplo, de um brinquedo eletrificado, com uma pequena engrenagem 3 no eixo com um diâmetro de 1 ... 7 e um comprimento de pelo menos 5 mm (a engrenagem grande 6 deve mova-se livremente ao longo dele, desaparafusando do brinco). Antes de instalar o motor elétrico, é necessário verificar a qualidade do isolamento do enrolamento do rotor - a resistência à fuga deve ser de pelo menos 1 MΩ. Uma engrenagem grande adequada que fornece quatro a cinco vezes a desaceleração pode ser encontrada no mesmo brinquedo. Outros detalhes do gatilho: 6 - eixo da caixa de engrenagens (aço); 2º suporte interno (é fixado no "fundo" do corpo); 3- mola plana macia no eixo, empurrando-a para fora; 5 - rolamento de bronze ou latão prensado na parede da carcaça. O brinco de acoplamento do eixo da engrenagem com tensão da mola pode ser feito conforme a variante mostrada na fig. 3, B. Neste caso, deve ser feito um furo com um diâmetro de cerca de 25 mm na tampa da caixa (seu lugar na Fig. 1 é marcado pela seta A), através do qual, girando a engrenagem grande do redutor com um dedo, o extremidade de seu eixo é aparafusada no brinco. Este é um acoplamento de alta confiabilidade, não está sujeito a praticamente nenhuma influência estranha. De acordo com outra opção (Fig. 3, c), o brinco, cuja rosca é preservada apenas na parte inferior de seu orifício elíptico, é simplesmente lançado na extremidade do eixo da caixa de engrenagens que sai da carcaça.
A subcotação começa com o aparecimento de "1" - uma tensão próxima à tensão de alimentação - no mecanismo de comutação SA2. Esta tensão bloqueia a entrada de contagem do contador DD3 (de acordo com CP; os sinais do sensor SF1 não podem mais alterar seu estado) e, abrindo a chave eletrônica, feita nos transistores VT1, VT2, liga o motor M1. Para 8 ... 10 revoluções de seu rotor, o conjunto "elo do eixo redutor" é desengatado e a mola de força, endireitando-se bruscamente, bate. Mas já no momento da desconexão deste nó (par de contato SF2) na entrada 12 do elemento DD2.1 existe uma tensão "única", o que leva ao aparecimento de "1" e na entrada R do contador DD3. Como resultado, o contador retorna ao seu estado original, “zero”, “2” é restaurado no motor do interruptor SA0 (tensão próxima ao potencial do barramento zero), os transistores VT1, VT2 fecham e o motor elétrico, tendo feito apenas as revoluções necessárias, desliga. A recarga da máquina é realizada com a chave seletora SA1 desligada: seu par de contatos SA1.1, em curto nesta posição, "segura" a eletrônica da máquina no estado de pré-lançamento. O atraso do autômato, ou seja, o tempo entre o aparecimento do sinal 1 no motor do interruptor SA2 e o engate real depende da velocidade e da potência do motor elétrico (pode ser fortemente forçado), a desaceleração da caixa de engrenagens, o número de roscas do eixo inseridas no brinco , a lubrificação de peças rotativas e, claro, o estado da fonte de energia. Na cópia fabricada, não ultrapassou 0,2 s. A sensibilidade do sensor SF1 é de 10 g / mm (força - na linha de pesca, movimento - no suporte de contato). Depende da suavidade das molas dos balancins. A fonte de alimentação da máquina equipada com um motor elétrico de 4 volts (de um brinquedo desinstalado) pode ser uma bateria de quatro células galvânicas ou baterias capazes de fornecer uma corrente de 0,5 ... 1 A durante a descarga de curto prazo (alguns décimos de segundo). a nutrição pode ser maior. Mas, é claro, não superior ao máximo permitido para microcircuitos de máquina. A máquina eletrônica descrita foi testada por um longo tempo na estação experimental marinha do Instituto de Biologia Marinha do Extremo Oriente da Academia Russa de Ciências (a área de água das ilhas de Popov, Reinike, Rikord, etc. ). A pesca era realizada principalmente para peixes de fundo em profundidades de até 20...25 metros. E embora as peculiaridades da pesca marítima - arremesso, deslocamento do barco ao vento, fundo irregular, outros obstáculos - imponham tarefas bastante difíceis para a máquina, ela praticamente não era inferior aos pescadores experientes em nada. E muitas vezes ele demonstrava sua superioridade ... A metralhadora também se distinguia por um limpo, quase nunca danificando os tecidos vitais. Isso acabou sendo uma surpresa agradável, pois os peixes também foram capturados para serem transplantados para o aquário.
A figura mostra o equipamento usual da máquina, próximo ao adotado em Primorye: linha de pesca principal 0,7 ... 1 mm, trelas - 0,5 ... 0,6 mm 3 ... 5 cm de comprimento, anzóis simples nº 10. . .12. Mas a chumbada é diferente: uma haste de aço com diâmetro de 6 ... 8 e comprimento de 250 mm ou mais. Tal chumbada e tal posição no fundo permitem que você mantenha a tensão da linha de pesca quase inalterada, mesmo com excitação perceptível. Mas isso é um acréscimo ao "pensamento" eletrônico da própria máquina. Apanhar peixes "a meia água" não era um problema para ele. A sensibilidade real da máquina pode ser julgada pelo peso mínimo dos espécimes capturados - 50 ... 100 g. O peso máximo do peixe era limitado apenas pela força dos cabos. Publicação: cxem.net
Máquina para desbastar flores em jardins
02.05.2024 Microscópio infravermelho avançado
02.05.2024 Armadilha de ar para insetos
01.05.2024
▪ Materiais robóticos com propriedades de seres vivos ▪ Jogador de futebol no controle ▪ O QI não está relacionado ao nível de inteligência de uma pessoa ▪ Memória 1000 vezes mais rápida que flash ▪ Descoberto asteroide duplo único
▪ seção do site Microcontroladores. Seleção de artigos ▪ Artigo Sonhando Sonhos. expressão popular ▪ artigo Como os tornados começam? Resposta detalhada ▪ artigo Zopnik tuberoso. Lendas, cultivo, métodos de aplicação ▪ artigo Sistema de refrigeração a água. Enciclopédia de rádio eletrônica e engenharia elétrica
Página principal | Biblioteca | Artigos | Mapa do Site | Revisões do site
www.diagrama.com.ua |




 Deixe seu comentário neste artigo:
Deixe seu comentário neste artigo: