|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPÉDIA DE RÁDIO ELETRÔNICA E ENGENHARIA ELÉTRICA Localizador acústico para o carro. Enciclopédia de rádio eletrônica e engenharia elétrica
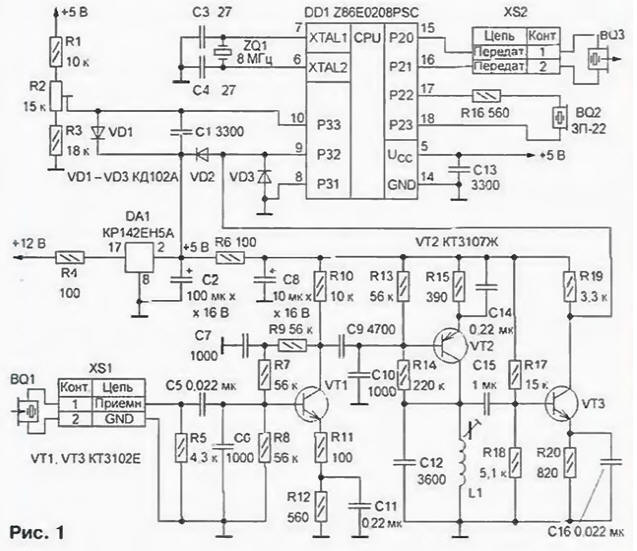
Enciclopédia de eletrônica de rádio e engenharia elétrica / Automóvel. Dispositivos eletrônicos Dirigindo em ré, o motorista do carro não consegue ver uma determinada área do espaço da estrada. Esta zona tem um comprimento de até dois metros, e nela podem estar pessoas ou animais, bem como objetos que interferem no movimento. As conquistas da tecnologia moderna possibilitam a criação de dispositivos especiais para visualizar o espaço especificado e informar o motorista se algum objeto for encontrado no caminho do carro. Este problema é resolvido de forma ideal com a ajuda da localização acústica pulsada. São conhecidas tentativas bem-sucedidas de construir tais dispositivos (ver, por exemplo, o livro Siga X., Mizutani S. "Introdução à eletrônica automotiva". - M.: Mir, 1989). No entanto, devido à complexidade e alto custo, esses localizadores ainda não foram amplamente utilizados. O localizador acústico oferecido aos leitores é baseado no microcontrolador Z8. É simples, conveniente para repetição por radioamadores. Com o refinamento apropriado do programa e design, pode ser usado como um assistente indispensável para cegos, dispositivos de segurança, ecobatímetro portátil para um pescador amador, indicador de nível de líquido sem contato, etc. O diagrama esquemático do localizador é mostrado na fig. 1. Sua base é um microcontrolador (MK) Z86E0208PSC (DD1).
O circuito de temporização externo do MK consiste em um ressonador de quartzo ZQ1 na frequência de 8 MHz e capacitores C3. C4. O emissor ultrassônico BQ3 é conectado diretamente aos pinos da porta P2 do MK. A amplitude da tensão de excitação na entrada do emissor é de 10 V. A duração do trem de pulso é de 1 ms. O sinal refletido recebido pelo receptor ultrassônico BQ1 é alimentado na entrada de um amplificador ressonante de três estágios feito nos transistores VT1-VT3. De sua saída, um sinal com componente constante de 2.5 V é alimentado à entrada não inversora (P32) do comparador integrado MK. Uma tensão exemplar de 2.7 V é fornecida à entrada inversora do comparador (RZZ) do divisor R1R3. o que garante a seleção de um sinal refletido útil no nível de interferência recebida. O circuito de tensão de referência é adicionalmente protegido contra interferências por um diodo limitador VD1 e um capacitor C1. Os diodos VD2 e VD3 limitam o valor instantâneo do sinal refletido aos níveis de 0 e 5 V. Um sinal sonoro que avisa o motorista sobre a presença de um obstáculo na zona invisível é gerado pelo emissor piezoelétrico BQ2. conectado através de um resistor R16 diretamente aos pinos da porta P2 do MK. O localizador é alimentado por uma tensão de 12 ± 2.5 V das luzes de sinal de ré do carro. O chip DA1 estabiliza a tensão de alimentação em um nível de 5 V, necessário para o funcionamento normal do MK. Um filtro é instalado no circuito de alimentação do dispositivo, composto pelos capacitores C2, C8, C13 e o resistor R6. O princípio de funcionamento do localizador baseia-se na emissão de uma rajada de pulsos de frequência ultrassônica e na posterior recepção de um sinal refletido por um obstáculo. O tempo desde o momento da emissão até o momento da recepção do sinal refletido é diretamente proporcional à distância ao objeto. Dependendo da distância, o localizador gera um dos dois sons de alerta: se for menor que 1 m, são gerados estouros de tom frequentes, se de 1 a 2 m - raro. A uma distância de mais de 2 m, não há sinal sonoro. O tempo de espera do sinal refletido é de 60 ms, após o qual a próxima rajada de pulsos é emitida e o processo é repetido. O funcionamento do dispositivo é explicado com mais detalhes pelo gráfico [1], mostrado na Fig. 2 Inclui quatro vértices - estados: SEND (TRANSFER) - a formação de uma explosão ultrassônica de pulsos; PRESS (SUPPRESSION) - supressão do emissor de som posterior; WAIT (WAITING) - esperando o sinal refletido e COUNT (CALCULATION) - calculando a distância até o objeto.
As transições entre estados, mostradas pelos arcos do gráfico, são causadas pelos seguintes eventos diretos (indicados por uma letra) e indiretos (duas letras de acordo com a transição): t (timer - timer) - operação do timer MC, c (comparador - comparador) - operação do comparador MC, ws (aguardar - enviar) - fim da espera pelo sinal refletido, cs (contar - enviar) - fim do cálculo da distância ao objeto e pw (pressionar - esperar ) - fim da contagem regressiva do tempo de supressão. Quando a alimentação é ligada, o dispositivo reinicializa automaticamente e o estado SEND é inicializado. A principal função deste estado é permitir a formação de uma rajada ultrassônica de pulsos com duração de 1 ms. Quando acionado, o temporizador MK coloca o dispositivo no estado PRESS, no qual não responde ao sinal refletido recebido. O tempo de permanência neste estado é determinado pelo número de operações do timer, que pode ser alterado dependendo do tipo de transdutor ultrassônico utilizado. No final da contagem regressiva do tempo de supressão, a próxima operação do temporizador coloca o dispositivo no estado WAIT. No estado WAIT, o localizador aguarda a chegada de um sinal refletido útil, que aciona o comparador MC. memorização do tempo desde o envio até o recebimento de um sinal útil e transição para o estado COUNT. O processo de contagem de tempo no estado WAIT é sincronizado pela operação do timer MK a cada milissegundo. Se após 60 ms neste estado o comparador MK não funcionar, o dispositivo muda novamente para o estado SEND. Quando o comparador é acionado, ele entra no estado COUNT. No estado COUNT, o localizador continua a contar o intervalo de tempo de 60 ms. Então, com base no tempo previamente registrado desde o momento do envio até o momento da recepção do sinal, é calculada a distância até o objeto. De acordo com o resultado do cálculo, o dispositivo controla a emissão de um sinal sonoro com o intervalo de "pausa de sinal" necessário. Após a conclusão dos cálculos, ele entra no estado SEND. Além disso, o ciclo de operação é repetido.Qualquer capacitor de cerâmica e óxido de tamanho pequeno pode ser usado no localizador. A bobina L1 é enrolada em uma estrutura unificada de seção única com um diâmetro de 8 e um comprimento de seção de enrolamento de 7 mm. Trimmer - ferrite (100НН) com diâmetro de 2,8 e comprimento de 12 mm. A bobina contém 860 voltas, enroladas volta a volta com fio PEL 0,15 (indutância 4.4 mH). Resistor R2 - SP5-2 ou qualquer outro aparador multivoltas de tamanho pequeno. Emissor de som piezocerâmico BQ2 - ЗП-22 ou similar. Transistores VT1. VT3 - qualquer um da série KT3102. VT2 - qualquer um da série KT3107. O transmissor ultrassônico BQ3 e o receptor BQ1 são idênticos. Na versão do autor, são utilizados transdutores ultrassônicos do dispositivo de segurança Echo-2 produzidos pela indústria, sendo possível utilizar quaisquer transdutores piezocerâmicos adequados, inclusive os de fabricação própria, com as mesmas frequências de operação na faixa de 36...38 kHz [2]. Para conectá-los, são usados conectores DJK importados (seus soquetes DJK-2MR são instalados na placa e os cabos de conexão são fornecidos com plugues DJK-2F). Os códigos "firmware" ROM MK são mostrados na tabela. A quantidade de código do programa é de 242 bytes.
Estruturalmente, o localizador consiste em uma unidade eletrônica e um emissor e receptor do mesmo design. 3.
A placa é colocada em uma caixa de plástico do designer de rádio "Dispositivo de comunicação" fabricado pela JSC "Novgorod Machine-Building Plant". A aparência do localizador montado é mostrada na fig. 4.
Para reduzir o efeito acústico do emissor no receptor ultrassônico, seus caminhos acústicos são feitos em forma de cornetas. A buzina, além disso, combina a impedância relativamente alta do transdutor com uma impedância de carga bastante baixa, ou seja, ar (3). A buzina exponencial mais eficaz, cuja área da seção transversal varia de acordo com a lei S \u0d S0em, onde S é a área da seção transversal da buzina a uma distância x do transdutor, S0 é a área da entrada da buzina (em x \u35d 0,17), ou seja, a área da superfície do transdutor, m é o coeficiente de expansão da buzina, que depende da frequência de operação (para 1 kHz m = XNUMX mm-XNUMX). Em casa, a maneira mais fácil é fazer um chifre, cuja seção transversal tem a forma de um círculo. Sabendo que a área do círculo é πD2/4, calcule o diâmetro do chifre usando a fórmula acima em diferentes distâncias x do transdutor (x pode ser limitado a 15...20 mm). Em seguida, de acordo com os valores obtidos, um perfil longitudinal do chifre é desenhado no papel e um gabarito é feito de papelão grosso ou lata. Os próprios chifres são feitos usando este modelo de espuma rígida. As superfícies das trompas acabadas são revestidas com tinta para dar-lhes melhores propriedades acústicas. Para proteger contra a ação atmosférica, as buzinas são colocadas em capas protetoras equipadas com suportes para instalação no para-choque traseiro do carro. É conveniente usar caixas de fiação de plástico como invólucros. Os suportes são feitos de chapa de aço. As lacunas entre o invólucro e a buzina são preenchidas com resina epóxi e toda a estrutura é coberta com várias camadas de esmalte sintético resistente às intempéries. O estabelecimento do dispositivo começa com a verificação da instalação quanto a conexões confiáveis e ausência de curtos-circuitos. Antes de instalar o MK, é aconselhável verificar o funcionamento do estabilizador de tensão e do amplificador de sinal ultrassônico. Para isso, conecte a alimentação e meça a tensão no pino 5 do painel MK. Deve estar dentro de 5 ± 0.3 V. Em seguida, meça a tensão constante no terminal 9 do painel MK (2.5 V ± 10%) e. conectando um voltímetro à sua saída 10. defina a tensão em 2 ... 0.2 V a mais que a primeira com um resistor de compensação R0.3. Além disso, conectando a entrada do osciloscópio ao terminal 9 do painel MK e aplicando um sinal senoidal com frequência de 37 kHz e amplitude de 3 mV à entrada do amplificador, um sinal com amplitude de 4.5 V é observado na tela do osciloscópio. Ao ajustar a indutância da bobina L1, o ganho máximo é alcançado na frequência indicada. Depois disso, com a energia desligada, um MC pré-programado é instalado no painel e o dispositivo é conectado ao emissor e ao receptor. Se o dispositivo não funcionar ao ligar a energia, conecte a entrada do osciloscópio (com uma resistência de entrada de pelo menos 10 MΩ) ao terminal XTAL2 (pino 6) do microcircuito DD1 e verifique se o gerador de clock MK está excitado. A ausência de oscilações de uma forma de onda senoidal com frequência de 8 MHz indica que o gerador não é autoexcitado. Nesse caso, você precisa verificar o ressonador de quartzo ZQ1 e os capacitores C3 e C4. Quando instalado em um carro, o localizador será colocado dentro do compartimento de passageiros e os transdutores ultrassônicos - no para-choque traseiro a uma distância de pelo menos 0.6 m um do outro. Esta distância fornece a largura da área de trabalho do localizador igual a 2 m. Ao alterá-lo. Você também pode ajustar a largura desta zona. Literatura
Autor: M. Gladstein, M. Sharov
Máquina para desbastar flores em jardins
02.05.2024 Microscópio infravermelho avançado
02.05.2024 Armadilha de ar para insetos
01.05.2024
▪ ADC de 24 canais de 256 bits para tomógrafos ADAS1131 ▪ Megabateria Tesla Megapack 1,5 MW
▪ seção do site Eletricista na casa. Seleção de artigos ▪ artigo Uma série de mudanças mágicas para um rosto fofo. expressão popular ▪ artigo A madeira funciona como filtro de ar? Resposta detalhada ▪ Artigo Jantar no deserto. dicas turísticas ▪ artigo Cartas misteriosas. Segredo do foco
Página principal | Biblioteca | Artigos | Mapa do Site | Revisões do site
www.diagrama.com.ua |




 Deixe seu comentário neste artigo:
Deixe seu comentário neste artigo: